图形学
图形学就是将真实世界的物体渲染至计算机中。
图形学和计算机视觉的区别
图形学: 将准备好的模型渲染为图片 计算机视觉: 利用计算机去猜测图片,从而将图片转换为模型。
Linear Algebra(线性代数)
Coordinate(坐标系)
坐标系分为很多种,例如笛卡尔坐标系,裁剪坐标系,世界坐标系等等。目前主要了解笛卡尔坐标系和裁剪坐标系,且如果在未说明的情况下,默认遵守右手螺旋定则,拿计算机屏幕来说
- 原点在屏幕中心,视为
- X 轴为水平轴,从原点向右为正,向左为负
- Y 轴为竖直轴,从原点向上为正,向下为负
- Z 轴为垂直屏幕,从原点向屏幕外为正,向屏幕内为负
裁剪坐标系和其他坐标系有所区别,它的最大值为 1.0,最小值为-1.0,即其他坐标系需要按照比例缩放至该值
Vector(向量)
向量的作用:描述值和方向
单位向量: 值为 1 的向量,只用来描述方向
Dot Product(点乘)
两个向量点乘,可以生成一个新的标量(数),且向量的点乘,满足于交换律,分配律,结合律
- 为两个向量的夹角
也可以通过坐标系来计算
- 可以用计算两个向量的夹角 (反余弦函数)
- 判断两个向量是否同向:值为正,则为同向;否则为反向
- 判断两个向量是否靠近:值越大,则越接近
- 可以求向量的分解,例如计算 的投影
Cross Product(× 乘)
x 乘,生成了另一个向量
新向量的方向:为垂直于 a,b 向量的平面,以右手螺旋定则,四指指向 a 向量旋转至 b 向量的方向,拇指即为新向量方向
新向量的模长:为
向量的 x 乘,并不满足于交换律,按照右手螺旋定则,如果产生交换的话,新的向量方向是相反的,但任然存在分配律和结合律
- 可以用来定义三位坐标体系
- 可以用来判断 在 的左侧还是右侧。例如可以检测多边形是凹还是凸
- 判断包含关系。例如可以用来判断 1 个点 a,在由 3 个点组成的三角形内还是外
Matrix(矩阵)
矩阵以 来表示,M 行 N 列。
矩阵加减法必须满足都是,
矩阵比较重要的应用是乘法,但乘法必须满足该条件 。即一个 M 行 N 列的矩阵乘以 N 行 P 列的矩阵,最终为 M 行 P 列。
矩阵 M1 乘以 M2 = M3,M3[i][j] 的值为 M1[i](M1 的第 i 行) 点乘 M2[j](M2 的第 j 列)
单位矩阵
乘以它不改变原矩阵,即主斜线(从坐上到右下)全都是 1,其他全是 0
- 只有 n * n 的矩阵才有单位矩阵
逆矩阵
矩阵乘法的逆运算得到的新矩阵,用 来表示。逆矩阵具有如下特点
- 只有 n * n 的矩阵才有逆矩阵
- 只有非奇异矩阵才有逆矩阵,即矩阵中的值不能为 0
- 矩阵相乘为单位矩阵
用途
- 解线性方程组:对于 ,如果 A 可逆,则
- 几何变换:撤销某个变换
转置矩阵
将行列互换,则为矩阵的转置,用 或者 表示。转置矩阵具有如下特点
- 任何 n * m 矩阵都有转置矩阵
- = M
用途
- 表示向量的点积,,两个向量的点积,等于将第一个向量转置后的乘法后的标量相等
Transform 变换
Linear Transformation(线性变换二维)
可以通过矩阵乘法直接完成的变换操作
Scale(缩放): , 为缩放因子
Rotate(旋转): 绕着原点,方向为顺时针旋转,为旋转角度
Shear(切变): 沿着 X 正方向,例如将一个矩形拉成平行四边形,切变移动
Nonlinear Transformation(非线性变换)
Transform(平移): 平移是无法通过一个矩阵乘法计算而得,而是需要通过加法
所以想要将所有变化统一为一种表示方法,即用坐标乘以矩阵的形式,目前是做不到的,引入了齐次坐标
Homogeneous Coordinate(齐次坐标)
引入了一个额外的参数,即二维需要三个参数,三维需要四个参数
齐次坐标表示一个向量(二维)
齐次坐标表示一个点(二维)
且当 w 不为 1 的时候,需要将坐标标准化,即会
借助齐次坐标,可以表示平移,x 平移,y 平移
当前其他的变换矩阵同样也可以以齐次坐标表示,例如缩放
复杂变换
目前的变换都是根据原点计算而得,那么如何计算物体绕着其他的点旋转呢,例如如何计算物体绕着自身中心旋转呢
- 将旋转中心平移到原点,物体也需要随之平移
- 执行旋转操作
- 将旋转中心平移回原位,物体也需要随之平移
借助矩阵的分配律,可以先将次变换的矩阵先行计算出来,最后再去乘坐标,以减少冗余计算
如果同时存在多个运动,常用的计算方式是 缩放 —> 旋转 —> 平移 依次计算(缩放,旋转,平移的计算顺序比较符合人的直观感受)
View Transformation(视图变换)
可以将图形学想象一次毕业合照,人群代表了准备好的模型,摄像机同为摄像机。那么拍一次毕业照需要经过如下步骤
- 人群站好自己的位置: 可以类比为准备好一堆模型(模型变换)
- 摄影师站好自己的位置: 可以类比为准备好相机(视图变换)
- 按下快门进行拍摄: 可以类比为进行一次投影(投影变换)
- 打印图片: 可以类比为进行一次光栅化,将 3D 的模型显示在 2D 屏幕上
根据物理的概念相对位置可以知晓,如果相机和模型的相对位置不变,无论他们处于什么位置,拍摄出来的照片肯定都是一致的。所以我们可以固定相机的位置,想拍摄不同的照片的话,就移动模型的位置
我们通过三个向量来描述相机的位置
- 相机的位置
- 相机的拍摄方向
- 相机向上的方向
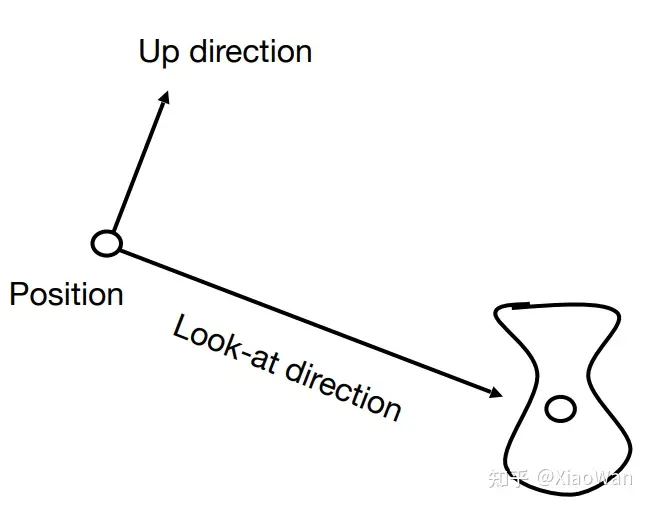
默认相机的位置在**原点,**默认拍摄方向为 -Z,相机向上的方向为+Y
那么如果相机的位置不在原点或者向上的位置不在+Y 该怎么办呢?借助前面的所说的变换,例如不在原点,可平移至原点;向上方向不是+Y,可旋转至该方向
Projection(投影)
投影就是将 3D 物体投射到 2D 平面上的过程,主要分为正交投影和透视投影
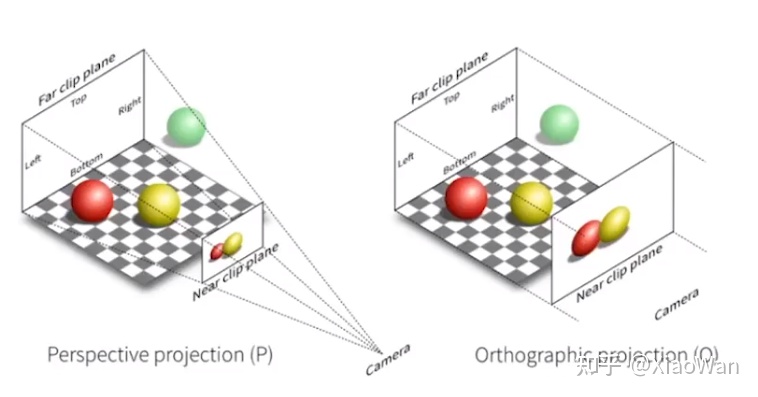
Rectangular Projection(正交投影)
认为光源是从很远的方向打来,是以平行光的方式照射物体,由于是平行光,则不会出现近大远小的情况,而是同样的大小。主要用于绘图等。
如何处理正交投影,分为如下两个步骤
- 平移: 由于正交投影是不会改变物体大小的,所以可以直接将投影移动到屏幕上
- 缩放: 将投影后的图形缩放为标准图形
标准图形: 在 X,Y,Z 方向都为 1 的立方体
Perspective Projection(透视投影)
认为光源是一个点光源,则在投影的过程中,则会出现近大远小的情况,用于模拟人的眼睛去看物体。可以想象两条铁轨,铁轨是不会相交的,但是眼睛看来,在远处铁轨相交了
如何处理透视投影呢,透视投影的矩阵如下所示,接下来推导求值的过程
透视投影可以根据小孔成像来解释和计算
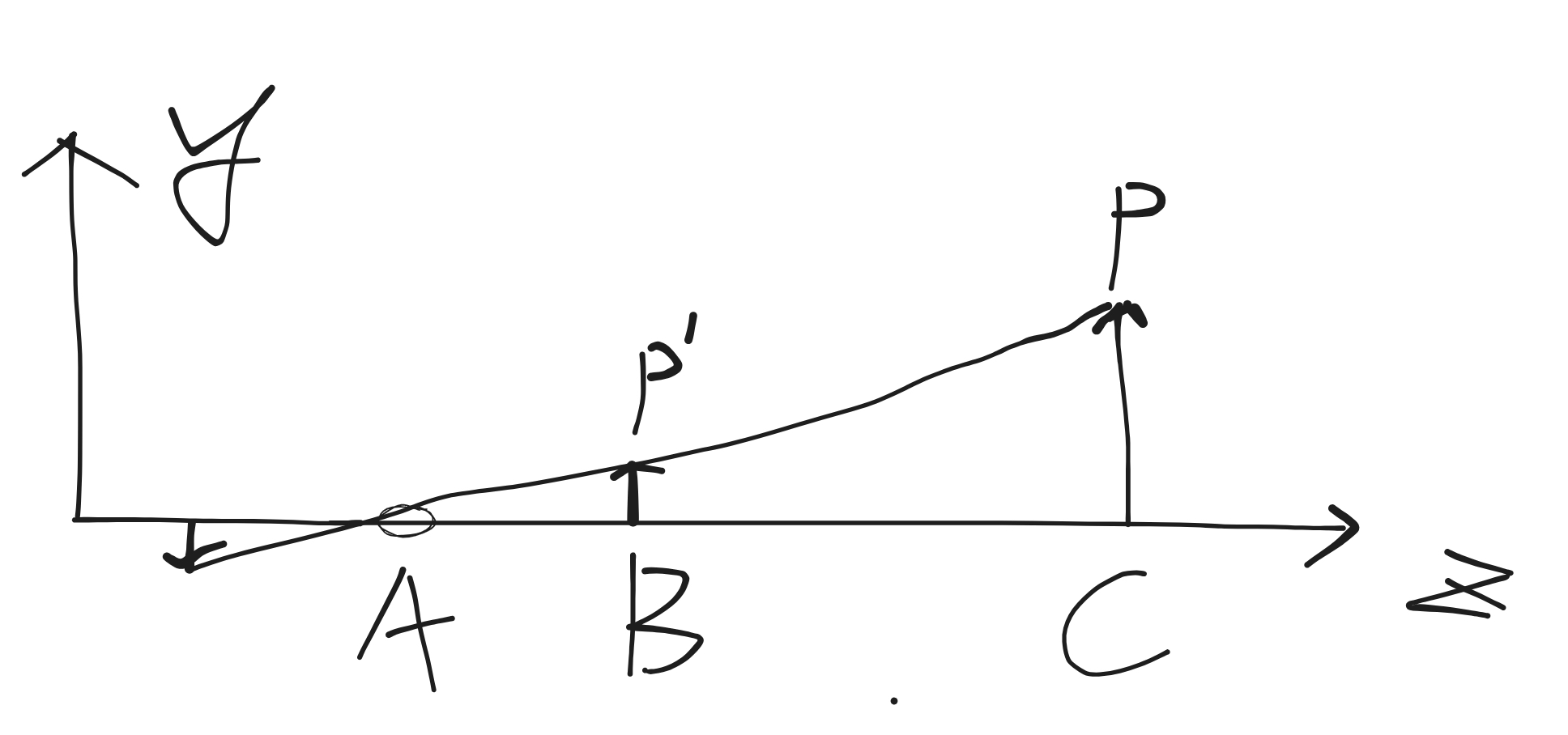
根据小孔成像,一个物体经过小孔成像后,影像是倒立的,不便于计算,在图形学中,可以通过将影像往前移动,移动到和小孔成像距离相同的位置,则可以得到一个方向和原物体一致,且大小和小孔成像一样大小的投影
设原物体坐标(齐次坐标)为
根据相似三角形的原理,原物体的点 x,y 投影后的位置
将 AB 距离记为 n。AC 的距离为已知,且由于相机的位置总是在原点,确朝向的是 -Z 的方向,则 AC 的坐标 Z 的方向是负的,则上述公式可记为。且同理 x’ 坐标也是一样的
利用齐次坐标,将除以 -z 的操作,转换为将 w 的值赋予 -z,根据上述公式可以推断出 x,y 行对应的矩阵值
对于 z 坐标,由于需要映射到的区间,则 z 的公式按照矩阵可以得出
由于 H 和 I 是 x,y 的坐标,不会对 z 产生影响,则 H,I 为 0
公式为
矩阵值为
由于在最 Z 轴的最近端映射到-1,最远段映射到 1
- f: 表示 Z 轴可见的最远 d 位置
- n: 表示 Z 轴可见的最近的位置
解出该二元一次方程组,可得 K、L
此矩阵未对 X、Y 轴进行裁剪,对 X、Y 裁剪的话,可以指定投影面上下左右的边界值,然后对其进行一次缩放平移操作,但是实际操作中,很少会直接定义投影面的上下左右边界,而是定义视角,根据视角大小和 n,以及长宽比,我们可以自行计算投影面的边界。这也是很多库中的 lookAt 的传参
Rasterization(光栅化)
光栅化其实就是将图形转化为像素网格,例如绘制在屏幕上
屏幕
什么是屏幕?一种典型的光栅化设备,有如下特点
老式的 CRT 屏幕是由电子激发荧光屏发光。针对整个屏幕来说,从左上角开始到右下角进行一次线性扫描,就可显示出图像,当每秒经过多次扫描后,即可形成视频。由于荧光屏只有发光和不发光两种状态,则只能显示黑白色
Pixel(像素): 基本显示单元,一般认定一个像素在单位时间只显示一种颜色(虽然事实不是这样,和显示器的排列有关,但可以近似的去理解),每一个像素点可以通过 Red、Green、Blue 来合成显示其他的颜色
将像素和屏幕综合起来看的话
- 以
(x, y)来描述一个像素 - 像素的范围由
(0, 0)~(width -1, height-1),即覆盖的是整个屏幕 - 每一个像素的中心电视
(x+0.5, y+0.5)
现代显示器从左上角到右下角是由无数个像素组成(每英寸的像素点的个数即为分辨率),由无数个像素点来组成一张图片。现代显示器在内存(显存)开辟一块存储区域 Frame Buffer,用于映射到屏幕,简单来说屏幕怎么显示是受 Frame Buffer 控制的
常用的有如下分类
- LCD(液晶显示器)
- LED(发光二极管)
- OLED
- Electronic Ink(电子墨水):通过电来控制白色墨水(显示白色)在上还是黑色墨水在上(显示黑色)
Sampling(采样)
那么如何能在屏幕上显示一个完整的图形呢?例如在屏幕中间显示一个三角形
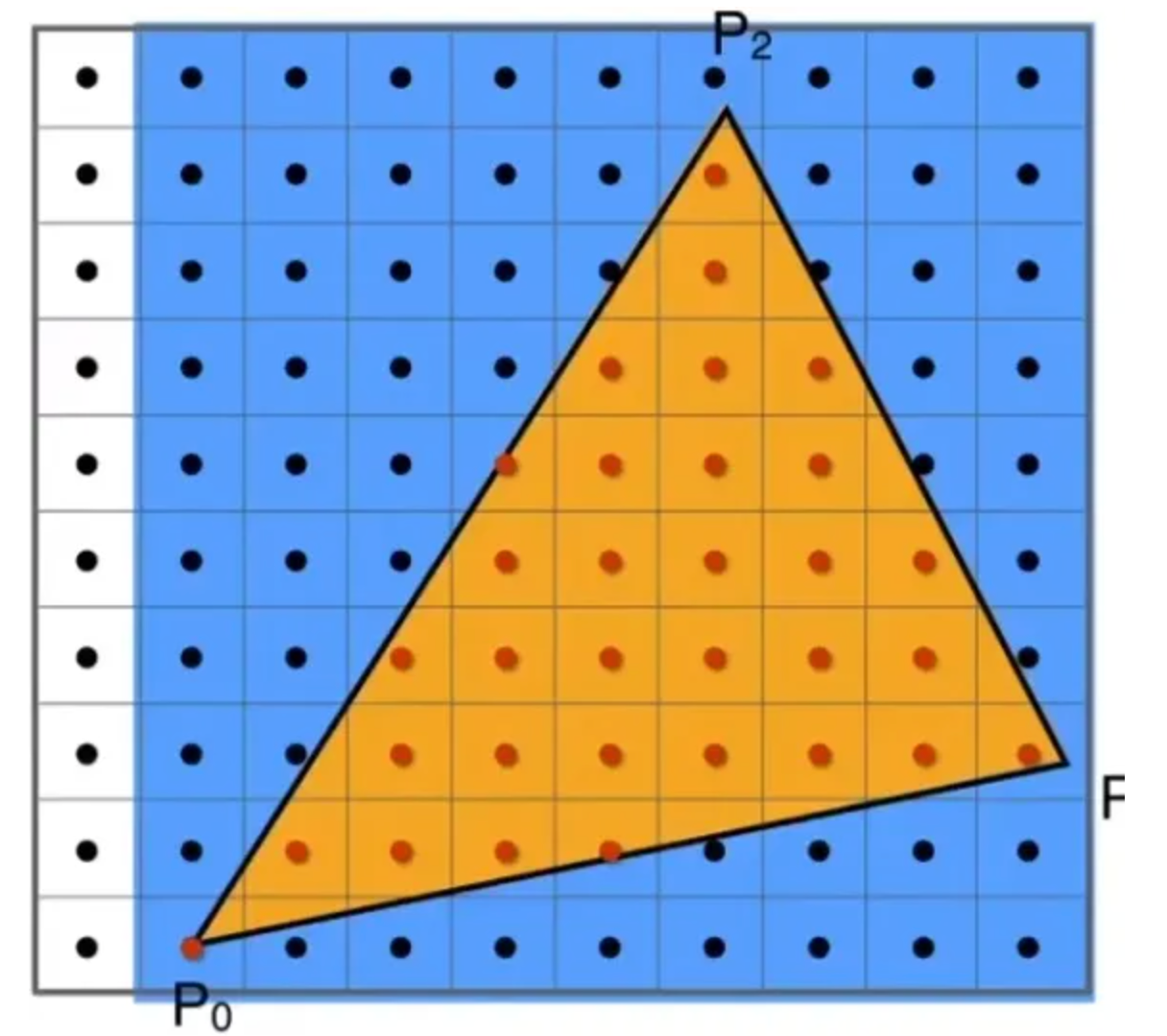
最简单的方法就是,遍历屏幕的每一个像素点,如果三角形占据了该像素点,那么这个像素点就发光,反之则不发光,这就是采样
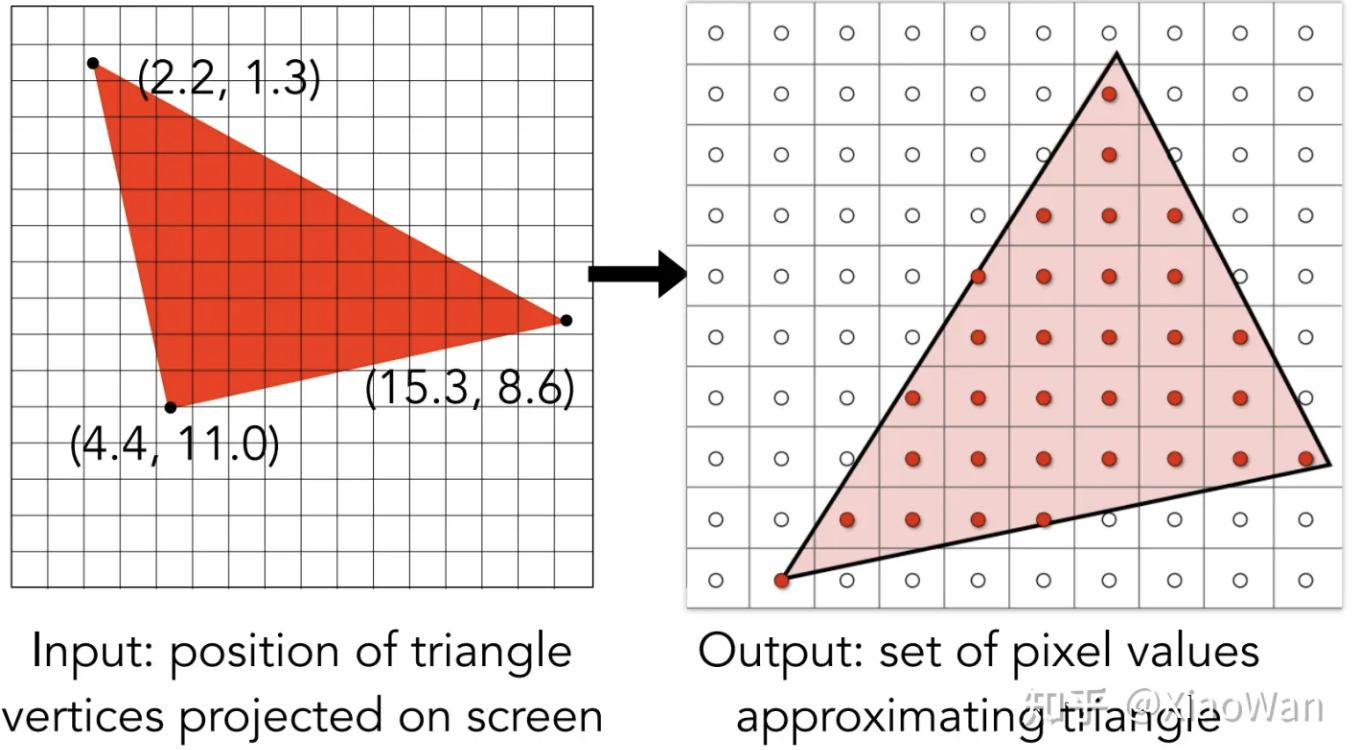
- 如何判断三角形是否占据了该像素点: 知道三角形的三个顶点,知道像素点,可以用上面提到过的,向量的 Cross Product,
- 有的像素点被三角形只占据了部分怎么办: 我们可以暂定这种没有完全占据的像素点不发光
当然,我们这个三角形并非充满了整个屏幕,所以遍历整个屏幕的像素点比较浪费性能,所以我们只需要遍历此三角形的 Bounding Box(包围盒) 即可,而不用遍历整个屏幕
Aliasing(采样瑕疵、走样)
拿我们上边采样来说,三角形的边不可能完美的按照像素排列,所以肯定有的像素点并没有被三角形完全占据,无论我们定义这部分的像素发光与否,最终都会形成如下
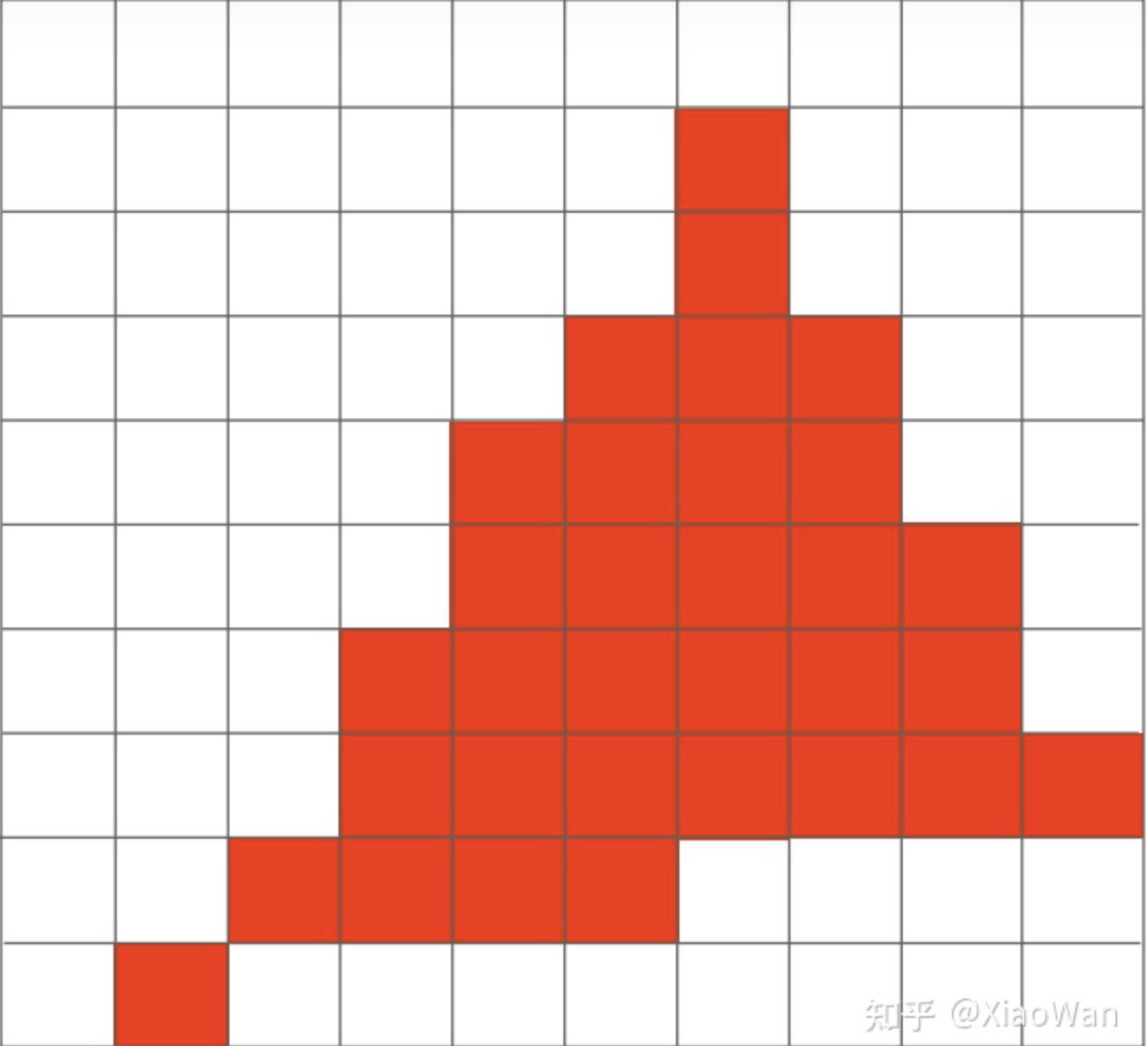
可以看待这里存在明显的锯齿,这就是采样瑕疵。生活中也有许多采样瑕疵,举个例子
- 锯齿
- 摩尔纹
- 车轮效应
Anti-Aliasing(反走样)
常用的反走样有很多方式,以下简单列举下
- 增加采样率,即将像素点分的足够小,足够密集,人眼则无法观看到锯齿
- 超采样
- 抗锯齿,目前常用的
抗锯齿的处理步骤如下
- 模糊处理: 先将图片模糊处理
- 对每个像素进行采样
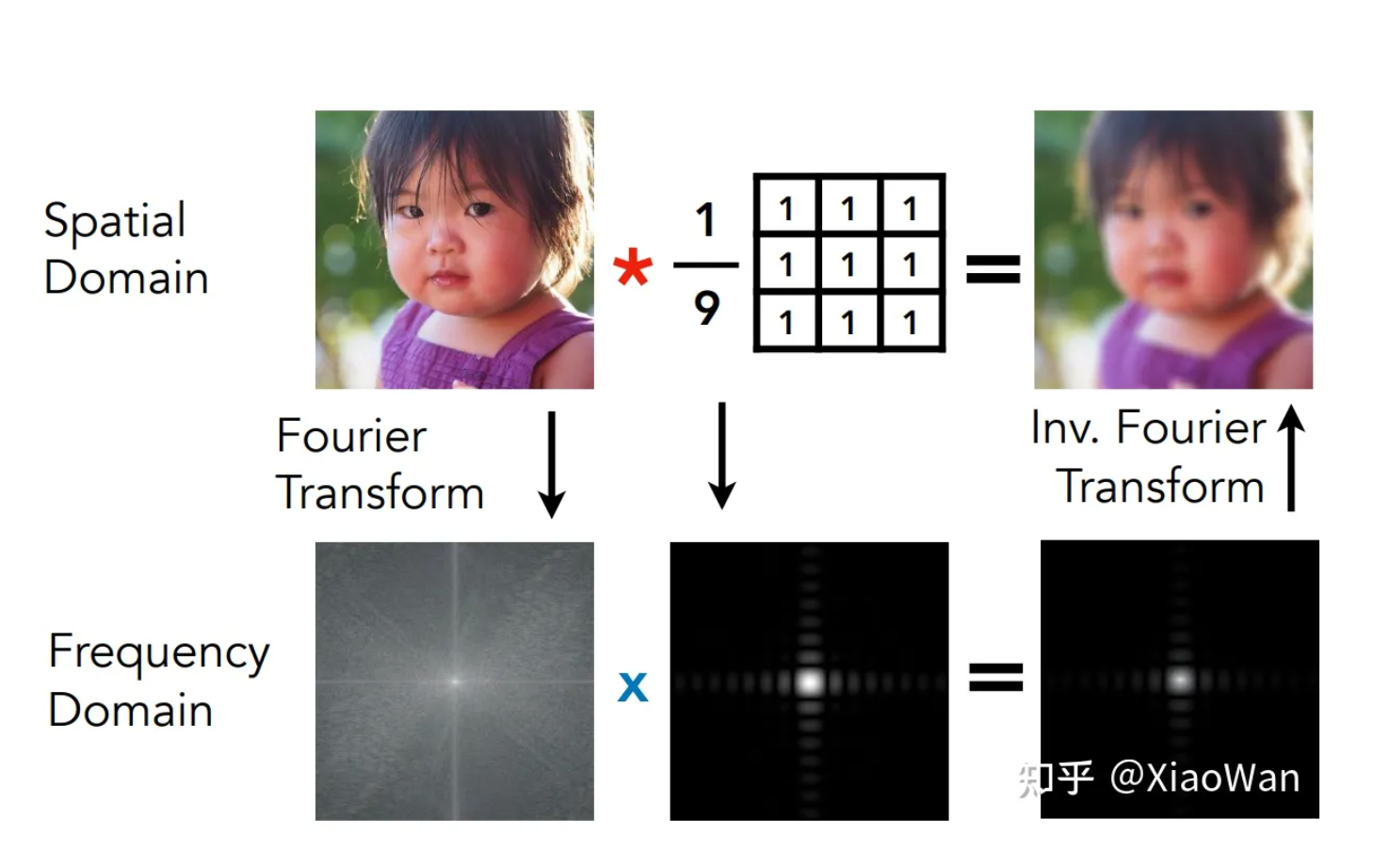
那么如何对图片进行模糊处理呢?
在时域上的一张图片,可以根据傅里叶变换,变换为一张频域的照片,再去掉高频的(相差很大的),再经过逆傅里叶变换,则可以获得一张模糊的图片,整个操作称为滤波。在实际操作中,使用一个卷积核去卷积三角形的每个像素
滤波:删除特点的频率
- 高通滤波:只显示高频的信息,即锐化
- 低通滤波:只显示低频的信息,即模糊化
这里的 卷积 == 滤波 == 平均
那么如何对每个像素进行采样呢?例如对某个像素点,三角形占用大部分和占用小部分时颜色该如何计算呢? 假设在一个像素内,该三角形占 25%,则此处颜色为 25% 的三角形颜色,如果占 50%,则此处颜色为 50% 三角形的颜色,依次类推。但是这种得到占比的算法非常复杂,虽然得到精确的占有率非常困难,但是可以使用一个较为简单的方法来得到近似解
MSAA(多重采样抗锯齿),在一个像素内多增加一些采样点,例如将一个像素变成 4 个采样点,再分别计算每个采样点是否被三角形覆盖,最终合一起就是一个像素的近似数据。和超采样抗锯齿(SSAA)的区别是
- 超采样抗锯齿:是真实的生成了多倍像素,GPU 也会增加相对应的执行次数,所以性能消耗较大
- 多重采样抗锯齿:还是原来的像素个数,只是在一个像素内,增加了多倍的采样点,再将多个采样点颜色混合,Shader 的执行次数几乎不变
可见性
当两个物体出现遮挡时,原则上必然是近处的物体遮挡远处的物体,那么在绘制时如何判断
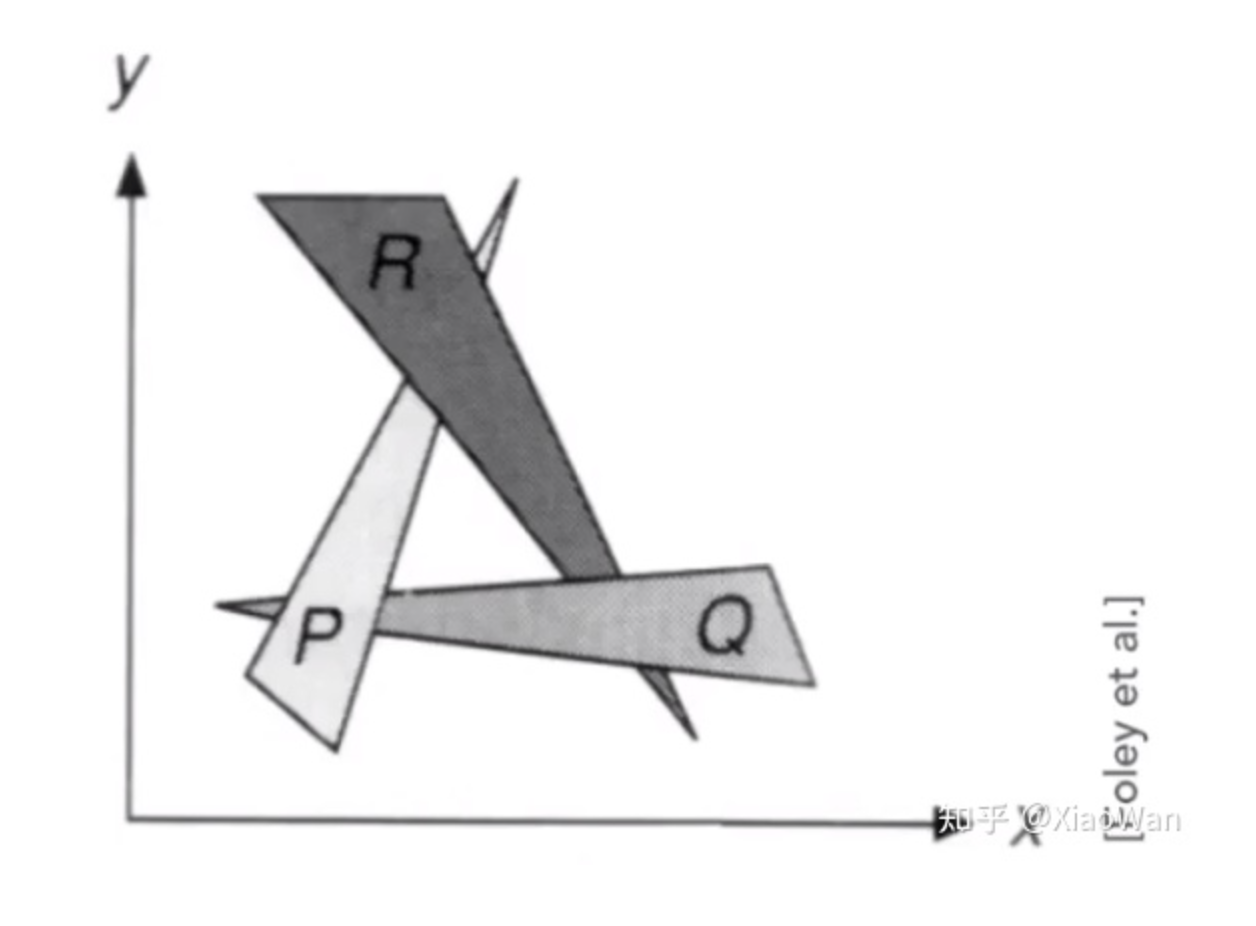
画家算法
根绘画的经验,先绘制远处的,再绘制近处的,然后近处的物体则会覆盖掉远处的。画家算法优点是比较简单,但是无法处理较为复杂的情况,例如当物体出现交叉,则回家算法无法准确绘制
Z-Buffer(深度测试)
深度图
储存每个像素对应的最浅的深度。使用 Z-Buffer 来保存每一个像素点的最浅的深度信息,当对图形的某个像素点绘制时,比较图形在当前像素点的深度和 Z-Buffer 存储的深度(请注意此处用的是深度,由于物体总是处于-Z 轴,取深度的需要注意正负号)
- 图形在当前像素点的深度 < Z-Buffer 存储的深度: 渲染当前图形,并更新 Z-Buffer
- 不做操作
在极端情况下,Z-Buffer 值相同该如何处理呢?如果 Z-Buffer 相同,则很容易出现一些闪烁的问题(Z-Fighting),可以采取如下方式解决
- 使用精度更高的 Z-Buffer。例如原来 Z-Buffer 保存 24 位,可以调整为保存 32 位
- 避免将图形放在非常非常近的面上
- 可以将图形偏移(Polygon Offse)。渲染前将图形微小偏移
结果图
储存最终的结果
Shading(着色)
对不同物体应用不同的材质(Material)
Blinn-Phone Reflectance Model(Blinn-Phone 反射模型)
- Specular highlights(高光)
- Diffuse reflection(漫反射)
- Ambient lighting(间接/环境光)
Diffuse reflection(漫反射)
漫反射有如下特点
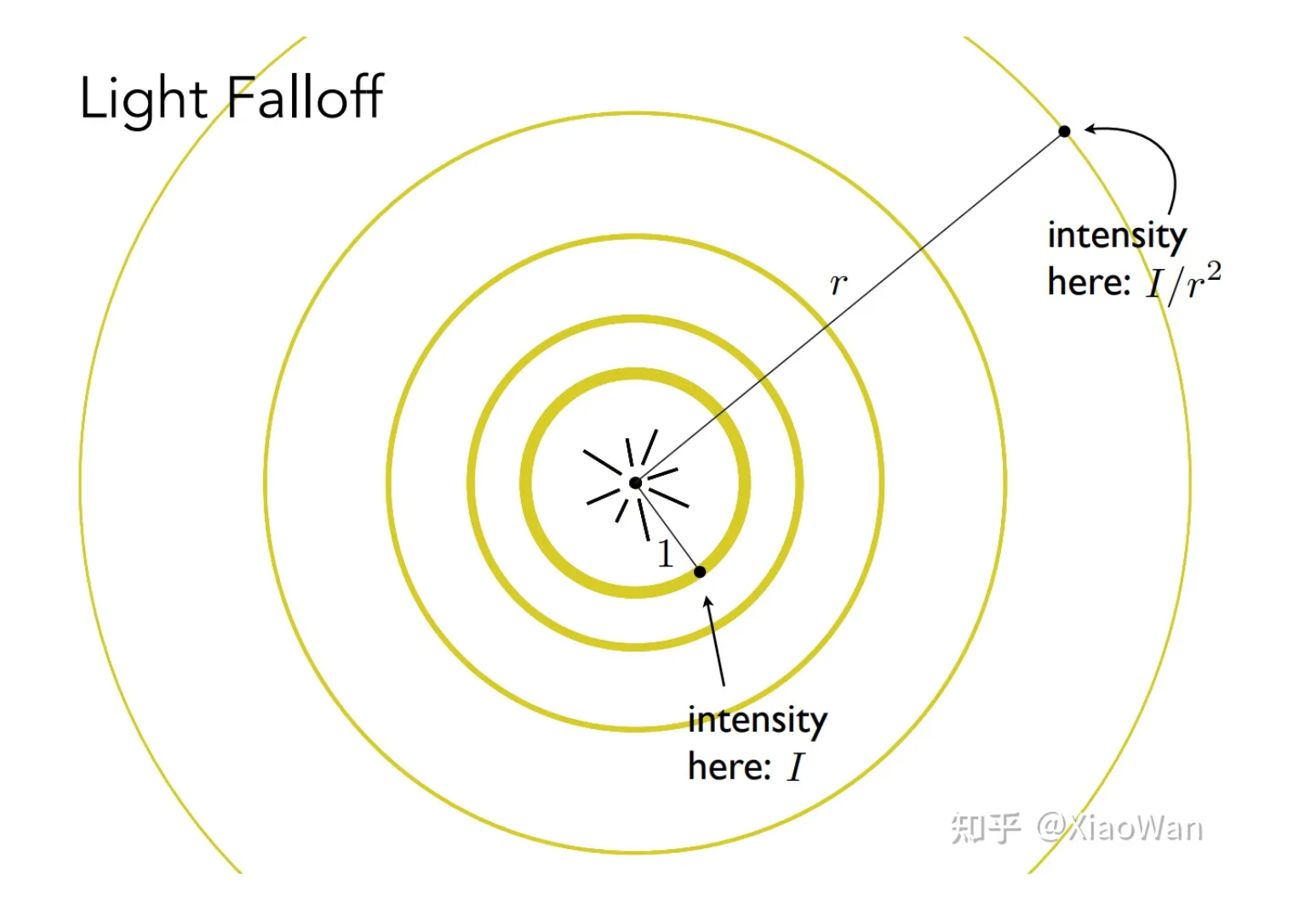
- 受光源的距离影响。物体离光源越远,则光线强度越弱,由于光线照射为一个球,设在单位距离的光照强度为,则在距离光源距离 r 的位置强度公式为
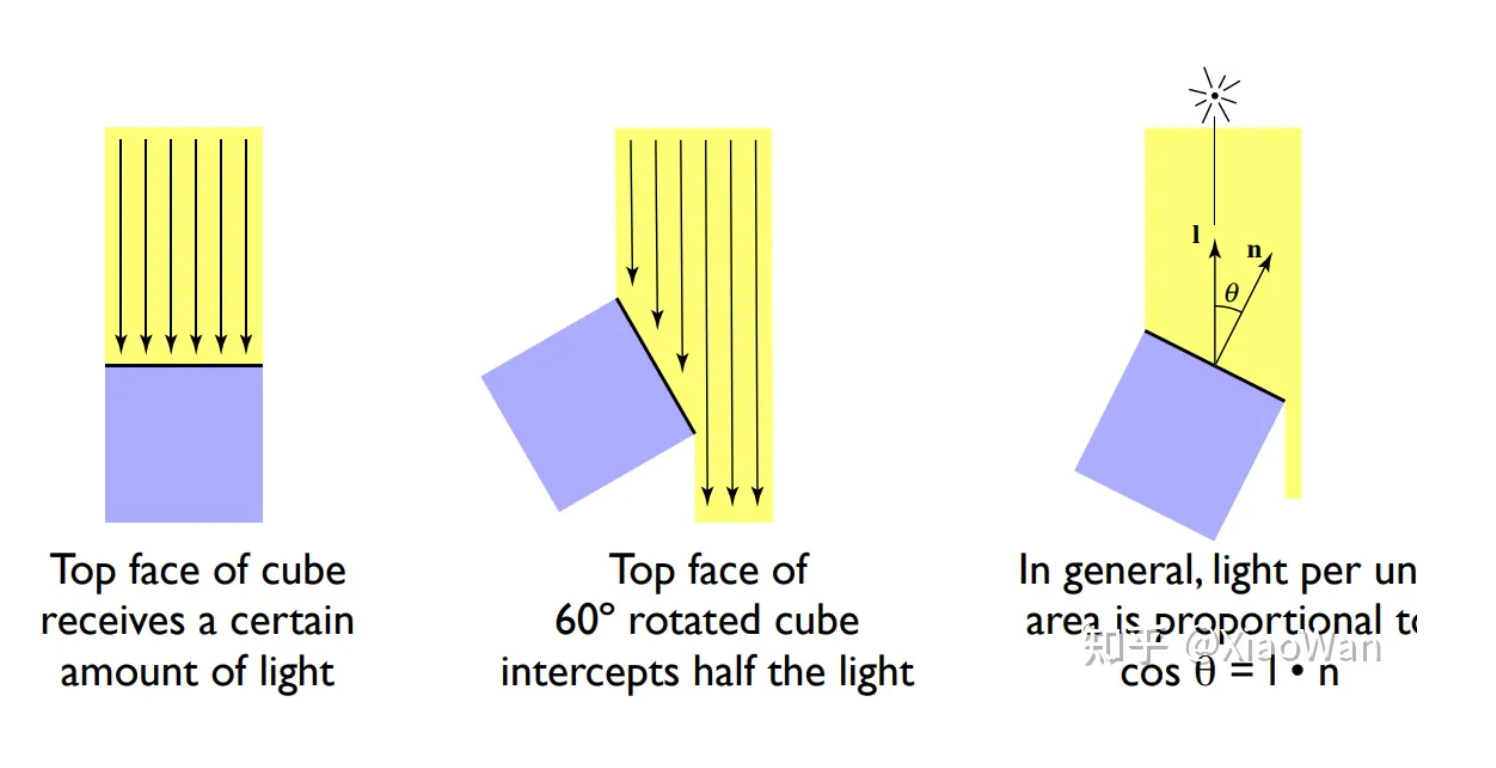
- 受光线入射方向、物体法线影响。
- 受物体本身影响。物体把不能吸收的都反射出去了,然后眼睛看起来就是这个颜色
- 漫反射想象为一束光照射到物体上,均匀的反射到各个方向,即各个观察角度观察到的光是一样的
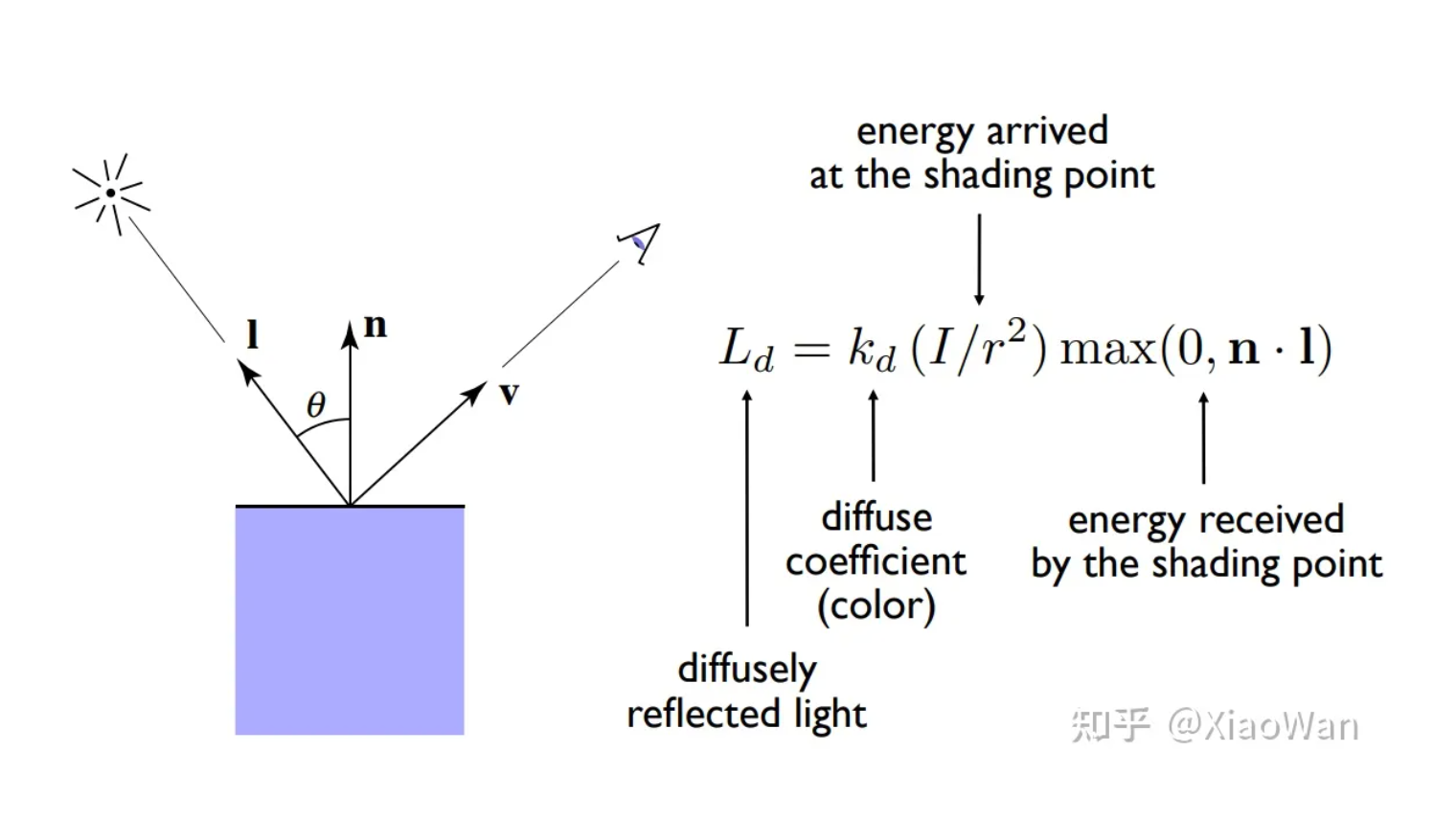
- 可以被观察到的漫反射的光
- 漫反射系数,表示的单位区域会反射哪种颜色
- 表示光源在单位距离的能量
- 表示单位区域距离光源的距离
- 表示单位区域的法线向量
- 表示单位区域到光源的向量
Specular highlights(高亮、镜面反射)
- 受光源距离的影响
- 受光线入射方向、物体法线、观察方向影响,由于是镜面反射,则法线方向必须是入射方向和观察方向组成的角的角平分线
- 受物体本身影响
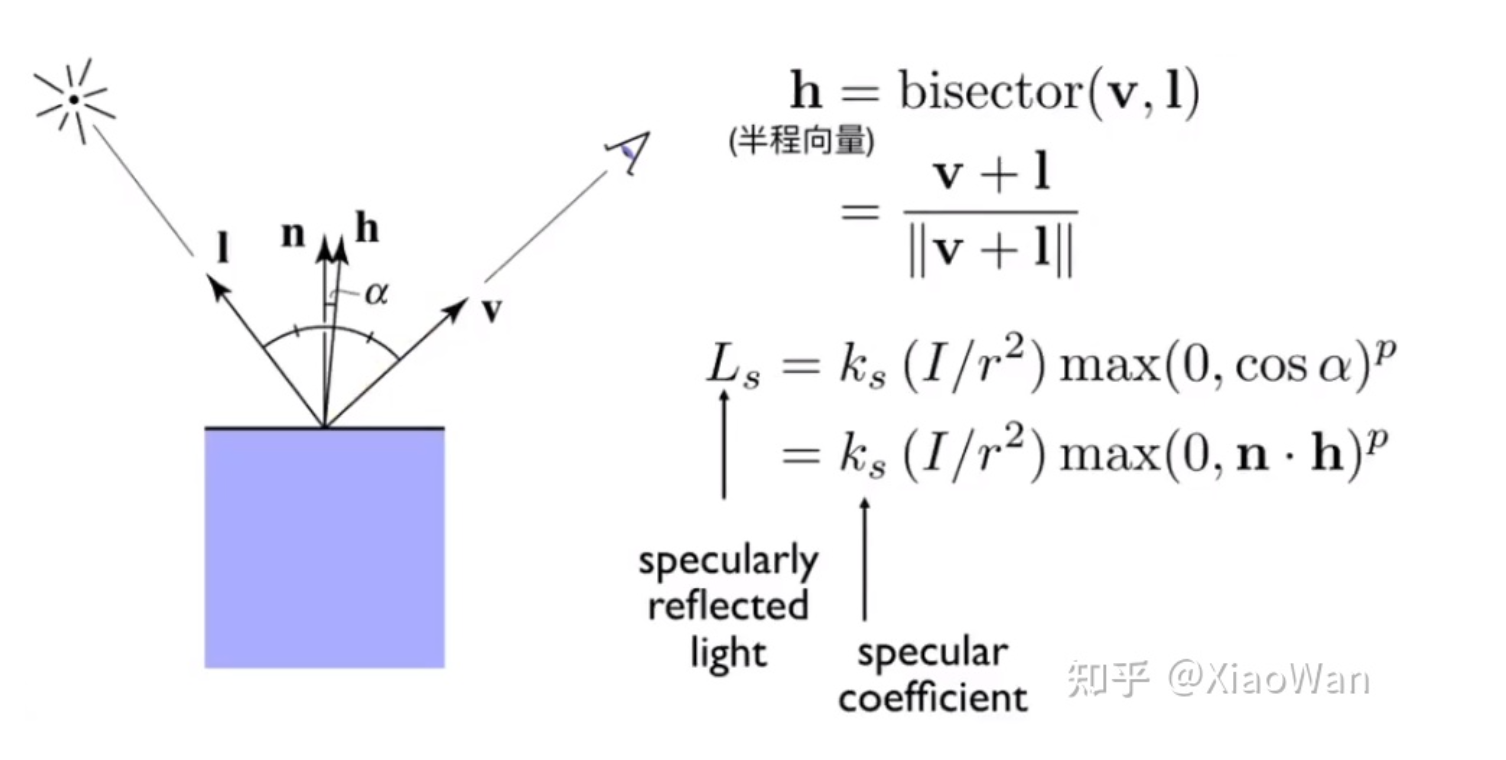
- 可以被观察到的镜面反射光
- 镜面反射系数
- 表示光源在单位距离的能量
- 表示单位区域距离光源的距离
- 表示单位区域的法线向量
- 表示单位区域到光源、单位区域到相机的半程向量
- 由于变换区间太小了,使用幂来增大变化区间
Ambient lighting(环境光)
环境光非常难于计算,所以认为环境光是四面八方照射而来,且与入射方向,法线,观察方向无关
- 受光源影响
- 受物体本身影响
- 可以被观察到的环境光
- 环境光系数
- 表示光源在物体的能量
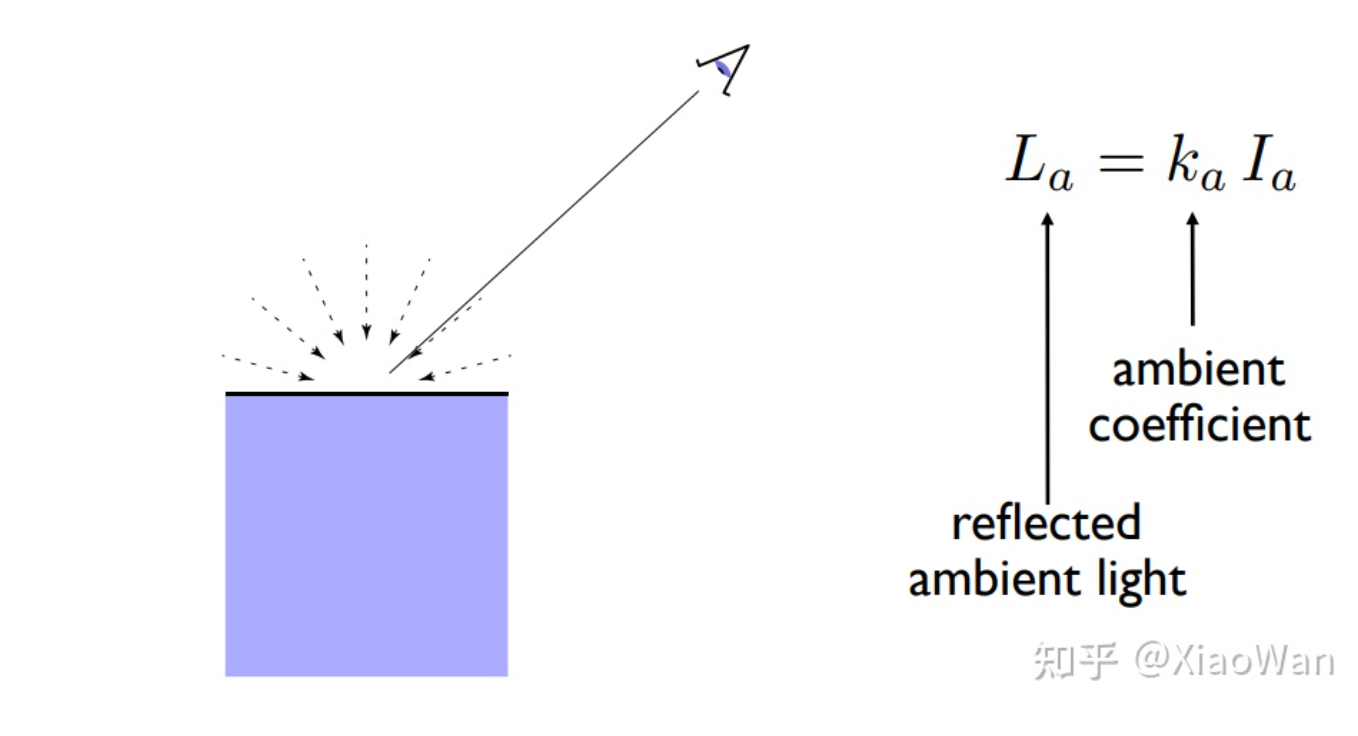
总公式为
Shading Frequencies(着色频率)
着色到底应用于那些点
- Flat Shading 着色于一个平面
- Gouraud Shading 着色于每一个顶点
- Phone Shading 着色于每一个像素
一般来说,着色频率越高,效果越高,计算量也更大。但事实无绝对,并非是 Flat Shading 效果就一定差,当物体的面足够多,分得足够细,效果也是非常好的
目前 webGL 着色频率为 Gouraud Shading(顶点着色器) + Phone Shading(片元着色器根据顶点着色器算每个像素的差值)
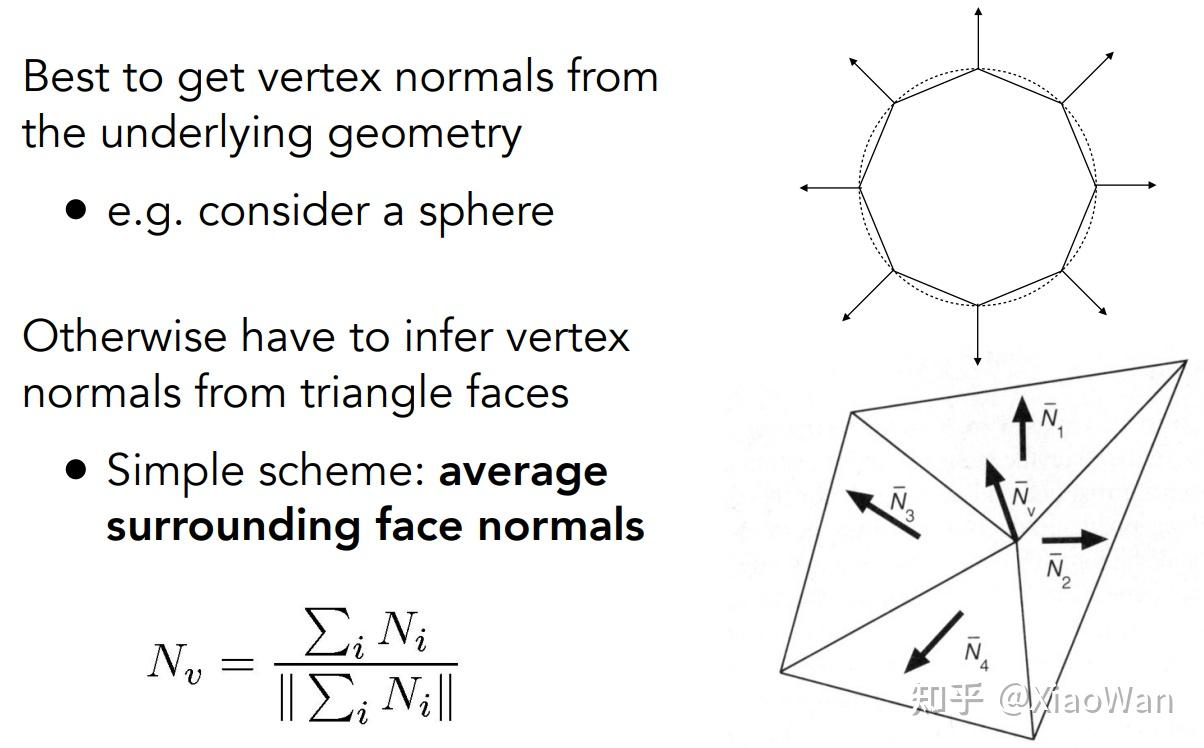
如何去计算一个顶点的法线
如果一个顶点在正方体上,就比较好计算,那如果在复杂图形中呢。在复杂图形中,取顶点周围的面的法线,进行加权平均
那如何计算一个面的法线呢,这就要用到向量的 × 乘了,取一个面上的三个点,两两组成向量,× 乘即可获取平面的法线(右手螺旋定则)
Real-time Rendering Pipeline(实时渲染管线)
目前渲染管线都是在 GPU 中被编程完成了,只有顶点处理和片段处理可以编程。整个步骤如下
- 输入空间中一系列的点
- 顶点处理
- 三角形处理
- 光栅化
- 着色
- 片段(像素)处理
- 帧缓冲区处理
- 输出
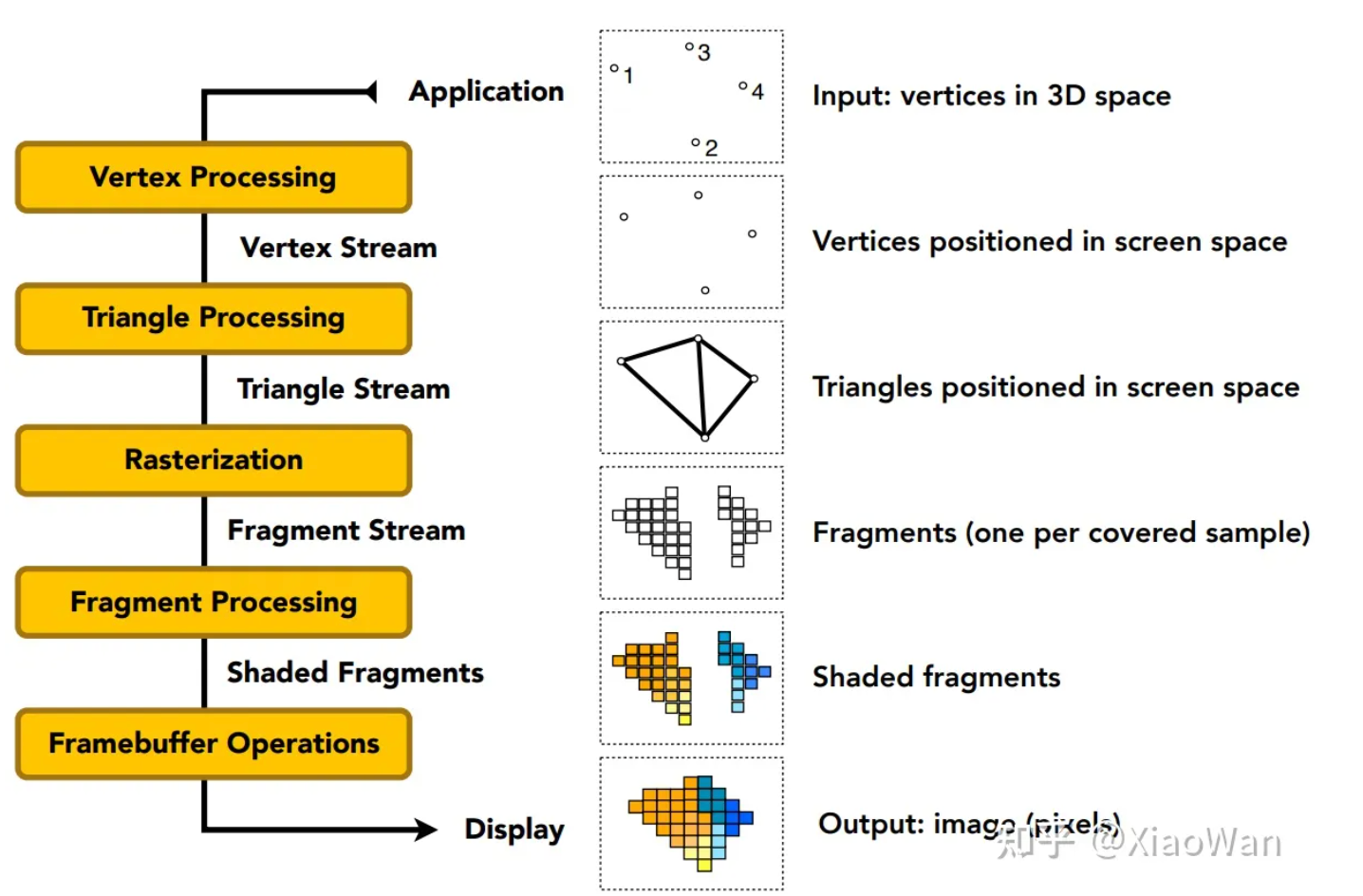
由于这些计算互相无关,则非常适合 GPU 的并发,所以看似计算量很大,确可以快速计算完成
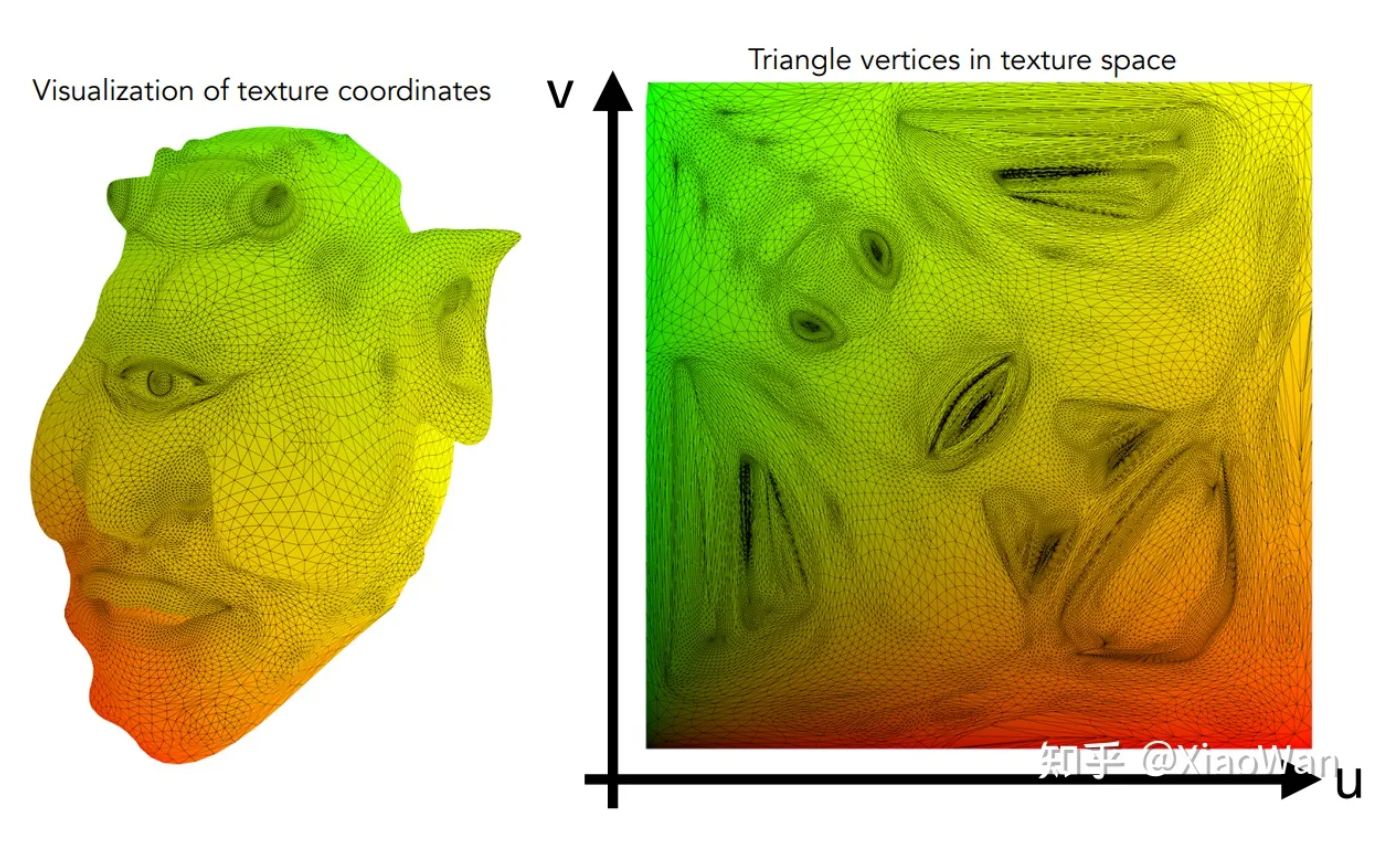
Texture Mapping(纹理映射)
定义某个点的基本属性。三维上的点可以被映射到纹理坐标系中(UV 坐标、ST 坐标)
线性插值及应用
为什么会需要插值?为了获取平滑的过度效果 有哪些需要插值?纹理,坐标系,法向量
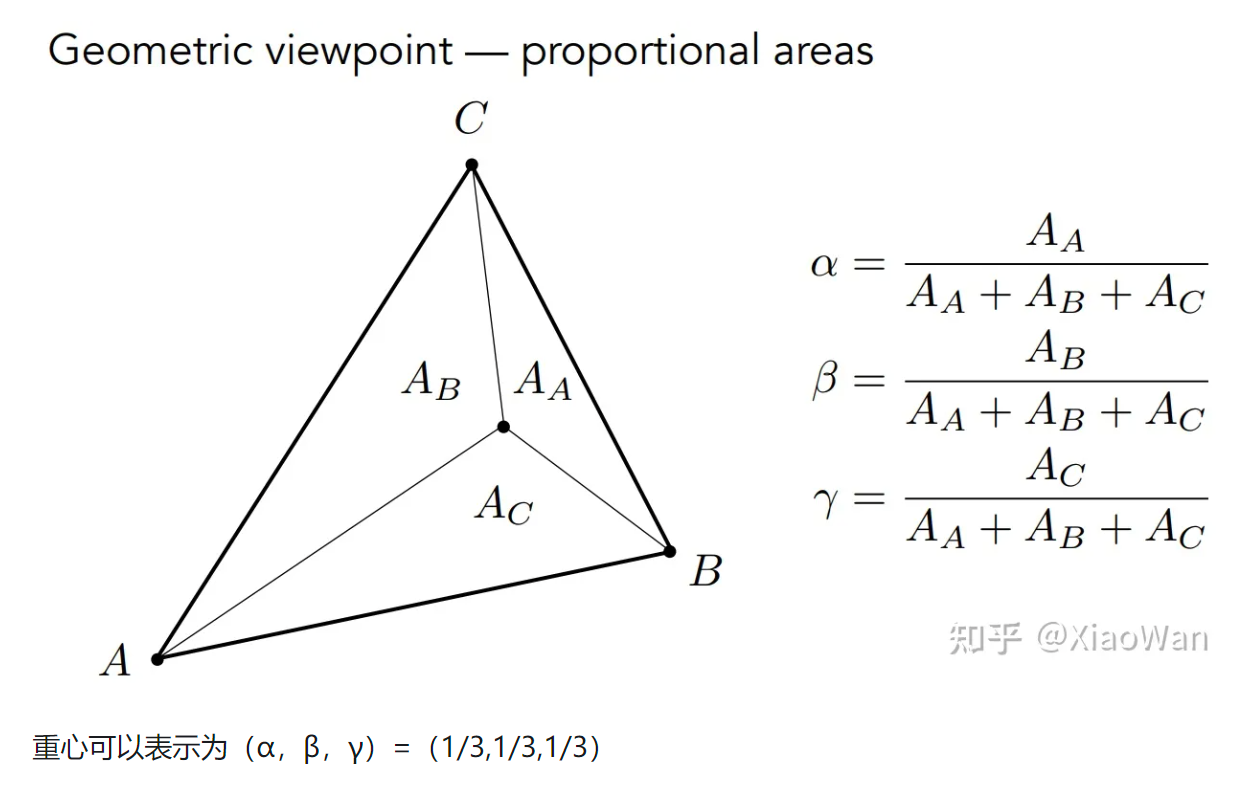
例如一个三角形,知道三角形的顶点,则三角形内任意一点都可通过三个点的插值计算而得
应用材质
将各个顶点,通过重心坐标映射到 UV 坐标内,UV 坐标对应的值,就是漫反射系数
问题 1 纹理太小如何处理
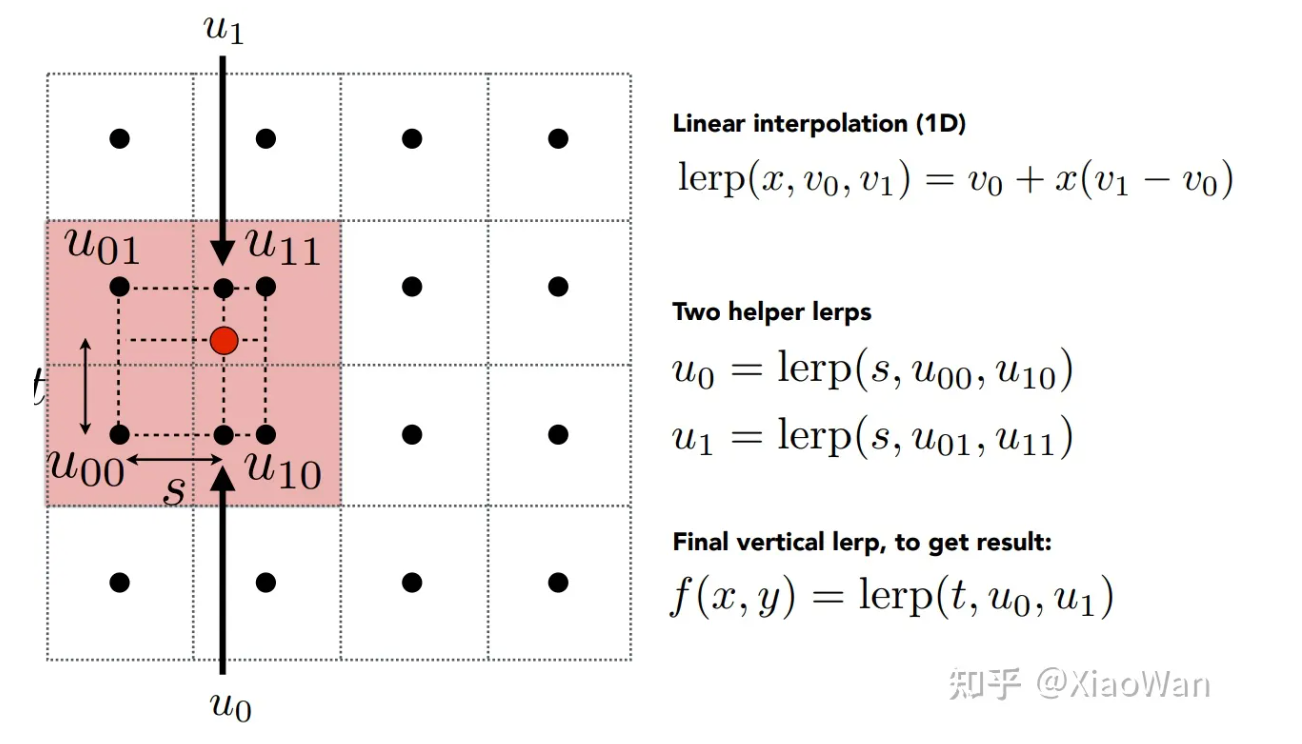
当纹理太小了,不同的顶点映射的 UV 值不会是正好一个像素位置,例如可能映射为 (1.2,3,2)的像素位置。此时可以采用双线性插值或者三重线性插值,下图为双线性插值
问题 2 纹理太大如何处理
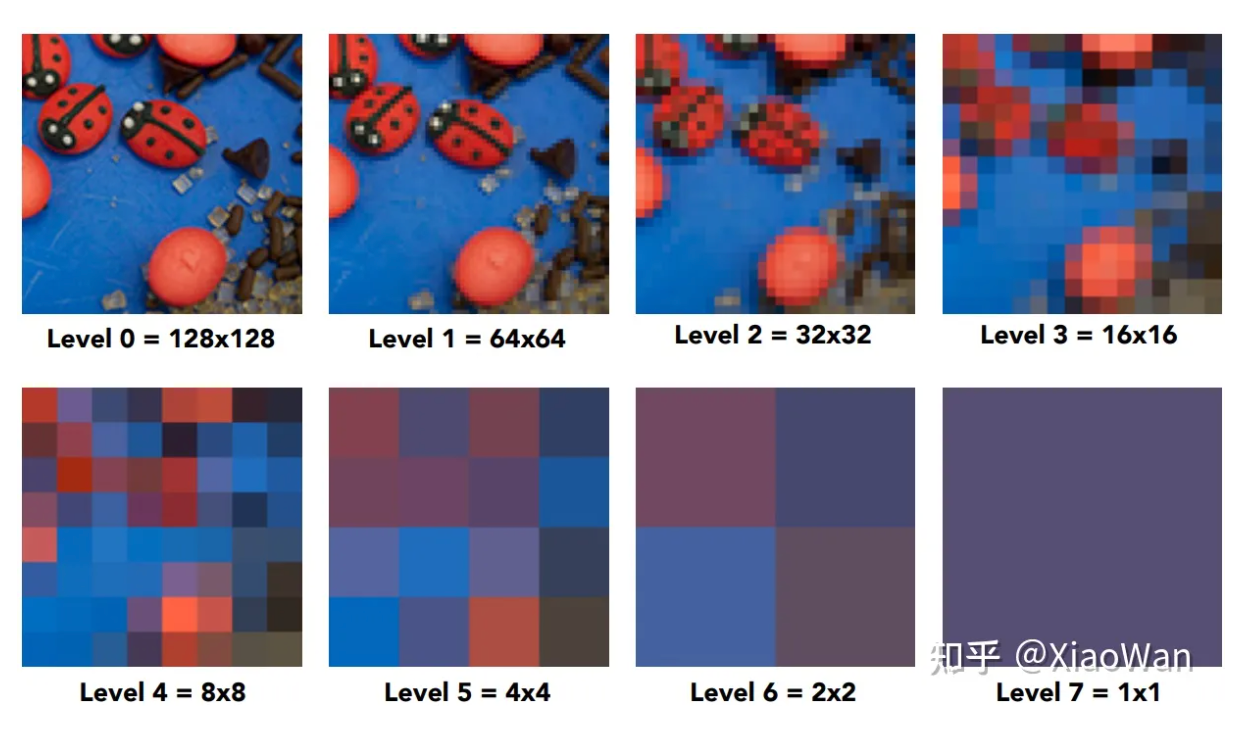
纹理过大,会造成模糊,近处出现锯齿,远处出现摩尔纹。使用Mipmap来解决**,**在不同分辨率下,提供不同的纹理
- Level0 是原始的纹理图像,每提高一个 Level,则分辨率缩小一倍,利用相邻的四个像素进行平均
- Mipmap 会需要额外的 1/3 存储空间
过渡不平滑
使用 Mipmap 会导致过度不平滑的问题,因为在 3D 中,由于计算而得不会恰好属于某一个层级,例如值可能为 1.2 曾。可采用 三线性插值,即在两层 Mipmap 先做双重线性插值,然后两层 Mipmap 再做线性插值
过度模糊
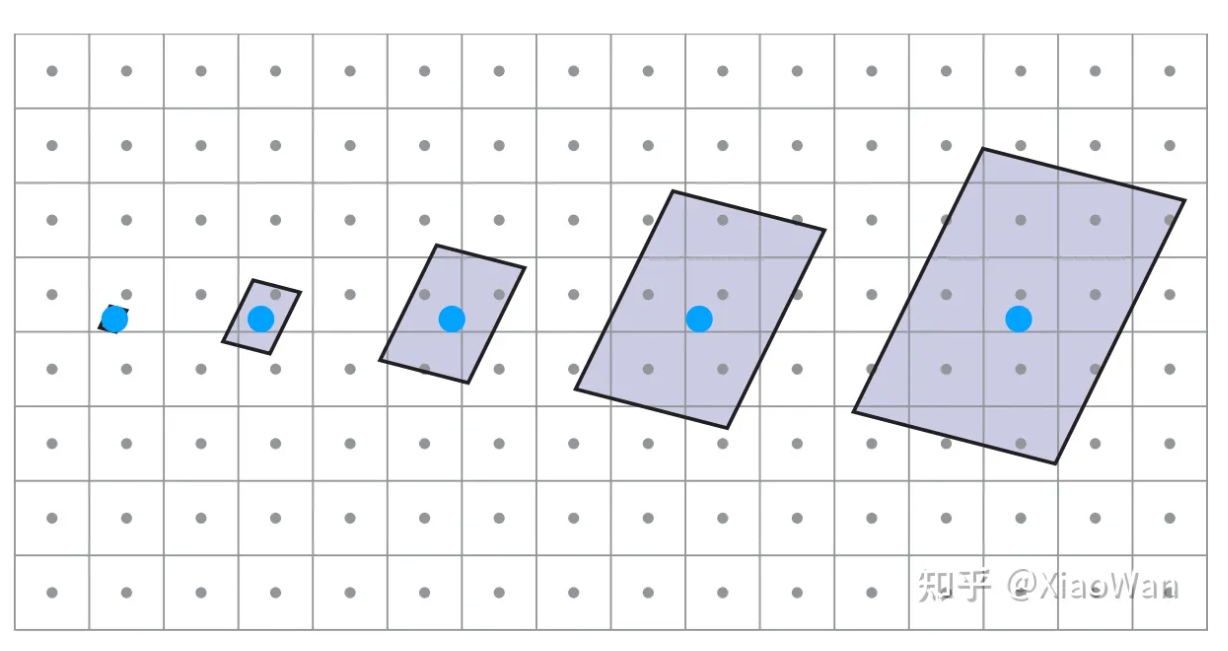
使用 Mipmap 可能会造成远处模糊,因为贴图基本为矩形,而 3D 中由于视角的问题,有可能是矩形,被拉伸,被压扁等等,导致如果在按照矩形去计算纹理的话,就会很模糊。使用多项异性过滤,即对 X,Y 采用不同比例的压缩
纹理映射的应用
纹理 = 内存 + 查询。纹理的数据会存储于内存中,我们可以对内存进行范围查询
球面环境映射
将环境光反射到球面
球面映射
将球面映射展开为平面,此时平面会出现扭曲
立方体映射
将环境光反射至正方图
凹凸贴图
以贴图来展示凹凸,而不用改变几何本身
三维纹理
Geometry(几何)
几何的表示方法
隐式
通过公式描述一个图形,例如无需描述每一个点的位置。例如圆球的公式为
优点
- 判断点是否属于图形较为容易
缺点
- 难以通过公式判断出图形的形状
显式
描述每一个点的位置。例如点云,多边形网格等待 优点
- 通过点可以判断出图形的形状
缺点
- 难以判断点是否属于图形,需要遍历所有的点
存储,表示一个几个图形,需要存储如下数据
- 点的位置
- 法线
- 纹理坐标
根据存储的如上数据,既可以绘制出一个图形
一些复杂的几何也是通过简单几个组合而成,组合计算一般为交集,并集,补集
贝塞尔曲线
给定一个起始点和**终止点**,中间给定若干个控制点来控制方向,由此绘制的光滑的曲线几位贝塞尔曲线
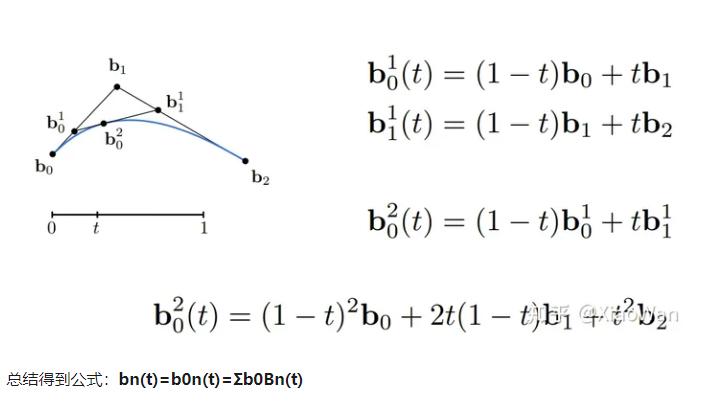
当控制点过度的时候,会影响绘制,一般采用分段贝塞尔曲线,例如可以以每四个控制点绘制曲线,再将其全部连接到一起
多边形网格
将面拆解为多边形(大多是三角形和四边形),存储顶点和多边形信息,
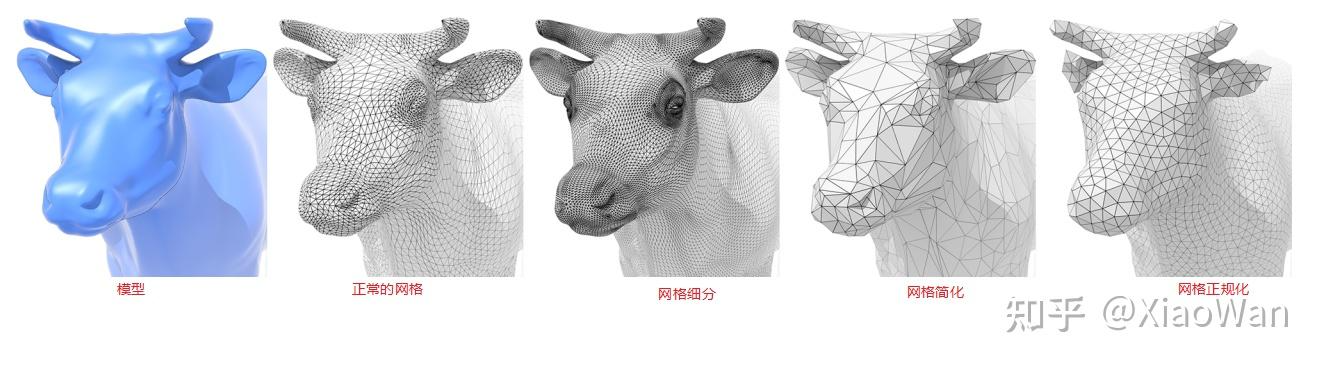
网格细分
网格面更多,模型更加精细
网格简化
- 让网格数更少,模型更加粗糙。
- 边坍缩,通过“二次误差度量”得到坍缩后最优的点
举个例子,当距离较远的时候,远处的模型看的不是很清楚, 没必要绘制的如此精细。
网格正规化
让网格中的三角形趋近于正三角形
Ray Tracing(光线追踪)
光纤追踪就是模拟光纤传播,在模拟的过程中计算每个像素的颜色(材质 + 颜色)
在计算光线追踪之前,需要做如下假设
- 假设光线是直线传播
- 假设光线之间不会互相干扰
- 假设光源是源源不断的发射光线
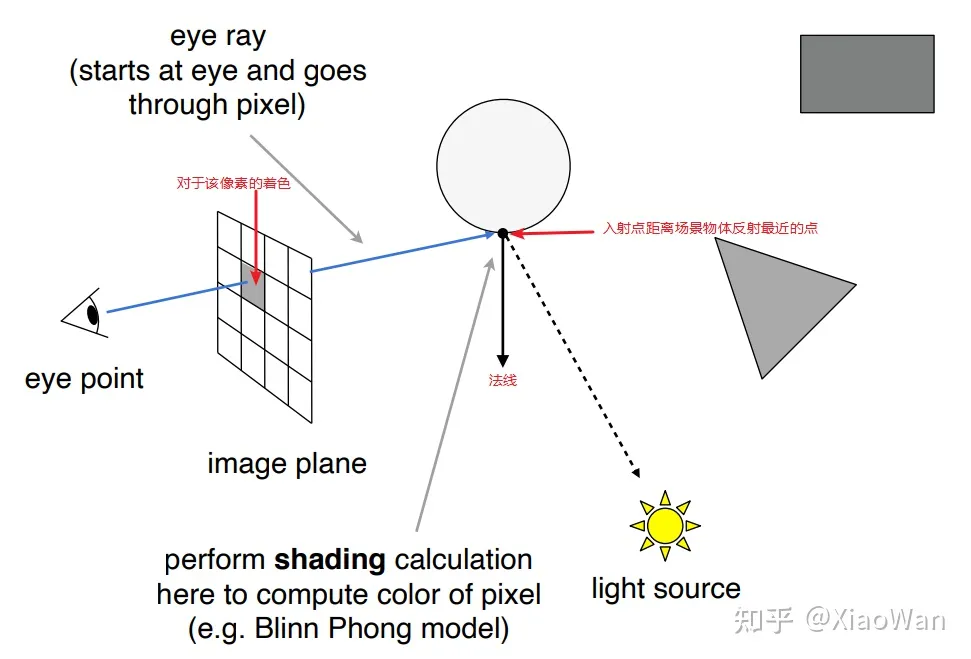
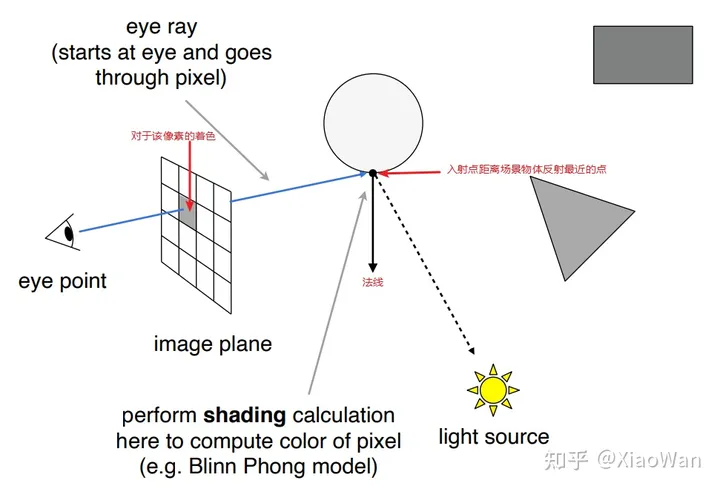
光线追踪的基本步骤
- 从观察点到成像平面的一个像素连接,发出一根光线到场景中
- 找到与场景中最先相交的点
- 该点与光源连接,判断该点的光照情况
- 根据判断结果,绘制该像素的颜色
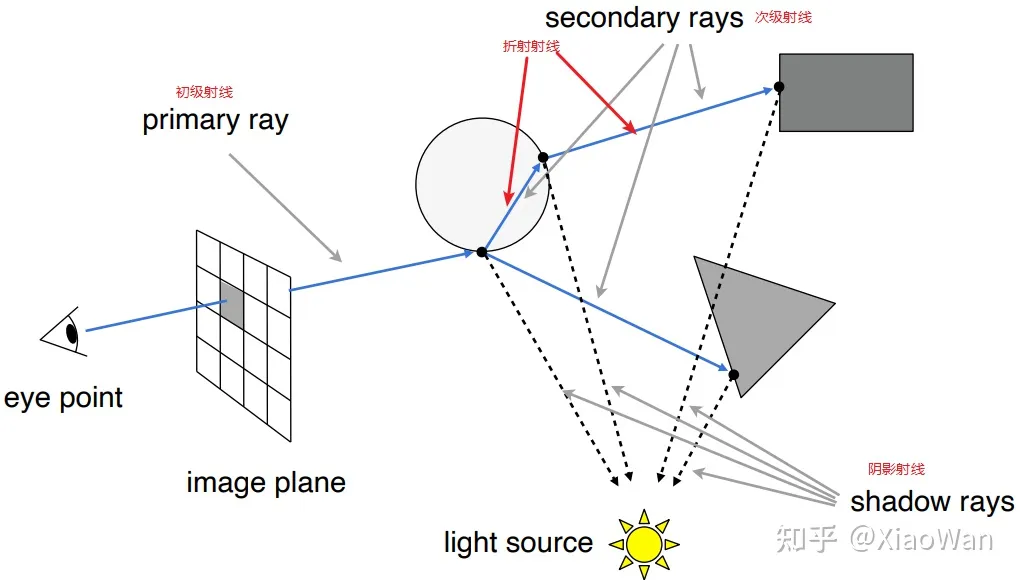
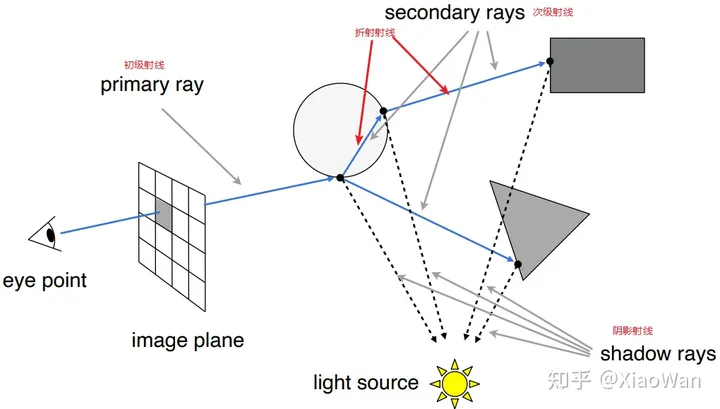
光线是会反射,折射的,所以需要对光线递归追踪,具备以下特点
- 光线的反射,折射
- 光线存在能量衰减
- 递归的最大次数限制,否则计算过程过于复杂
阴影
在无光追之前,如何实现阴影呢
进行阴影的深度测试,一个物体或者一个区域被光源和视线观察到,有如下情况
- 光源可以照射到,视线可以看到
- 光源可以照射到,视线看不到
- 光源照射不到,视线可以看到
- 光源照射不到,视线也看不到
视线看不到的时,无需绘制,即只有在光源照射不到的时候,而视线可以看到的时候有阴影。但阴影的深度测试有如下缺点
- 硬阴影视线较为简单,但是软阴影需要在阴影深度测试结构后,再使用阴影软化技术
- 由于 Shadow map 分辨率的问题,容易出现锯齿,也可用阴影软化技术优化
- 由于浮点数精度问题,在判定光源和视线时容易出现问题
可以更加好的实现如下效果,效果虽好,但是相较于光栅化性能较低
- 软阴影
- 毛玻璃的反射效果
- 间接光照(经过反射的光)
光纤传播的假设
- 光纤沿直线传播(虽然是错误的)
- 光线之间不会发生碰撞(虽然是错误的)
- 光线是从光源不断的传播到可视区域
Whitted-Style
光线的投射
- 从视点到像素连接,发出一根光线到场景中
- 找到与场景中最先相交的点
- 该点与光源连接,判断该点的光照情况
- 计算着色器
递归光线追踪
光线不仅会反射,还会折射,所以需要对光线递归追踪,具备以下特点
- 反射,折射存在能量衰减
- 反射,折射次数需要限制,不然计算量过大
确定光线与场景的交点
- 隐式几何:将光线带入方程式计算
- 显示几何:遍历场景中的所有点,计算光线与点之间的距离,找到最近的一个点。但是这种方法太慢了,使用*轴对齐包围盒(AABB)*来加速计算
轴对齐包围盒(AABB):只有 入包围盒 && 出包围盒 同时满足,才表示光线与场景有交点
当物体在场景分布不规律时,如何划分包围盒
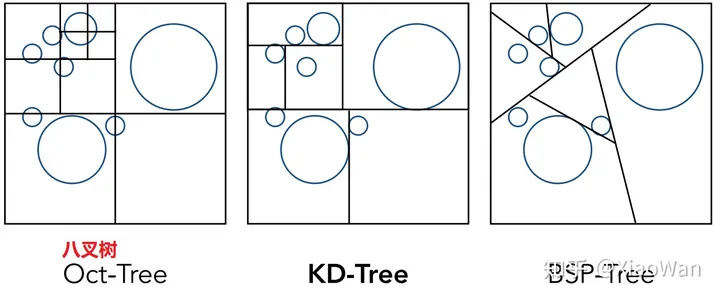
- 八叉树
- KD 树
- BSP 树
辐射度量学
Whitted-Style 不够真实,引入辐射度量学